Deze workshop is geschreven in 2021. De software en hardware die je gebruikt is inmiddels veranderd. Je komt er vast wel uit.
Deze workshop gebruikt de Arduino IDE als programmeer omgeving.
D.I.S.K – Digitale IOT Speelgoed Kit – prototype nummer 7
UPDATE: Versie 7 was het moment dat we DISK aan de wereld lieten zien. Inmiddels ontdekken we verschillende mogelijkheden om het ontwerp nog leuker te maken. In de WiFi Robot challenge gebruiken we een model dat daardoor in de details iets anders is dan de foto’s hieronder.
Hallo allemaal,
Maak kennis met project D.I.S.K., prototype nummer 7.
Digitale IOT Speelgoed Kit
D.I.S.K. staat voor ‘rond dingetje’ of het betekent misschien ook Digitale IOT Speelgoed Kit. Deze robot maak je zelf van mooie onderdelen die we ook herkennen in de industrie. Het is dus expres geen speelgoedwinkelding.
De rijdende robot doet het prima op vlakke rij gebieden zoals vlak tapijt, houten vloeren en een mooi glad bureau. Asfalt werkt wat minder, dan heb je andere wielen nodig. Je print D.I.S.K. In iets meer dan 2 uur en daarmee is het een mooi IOT middag projectje.
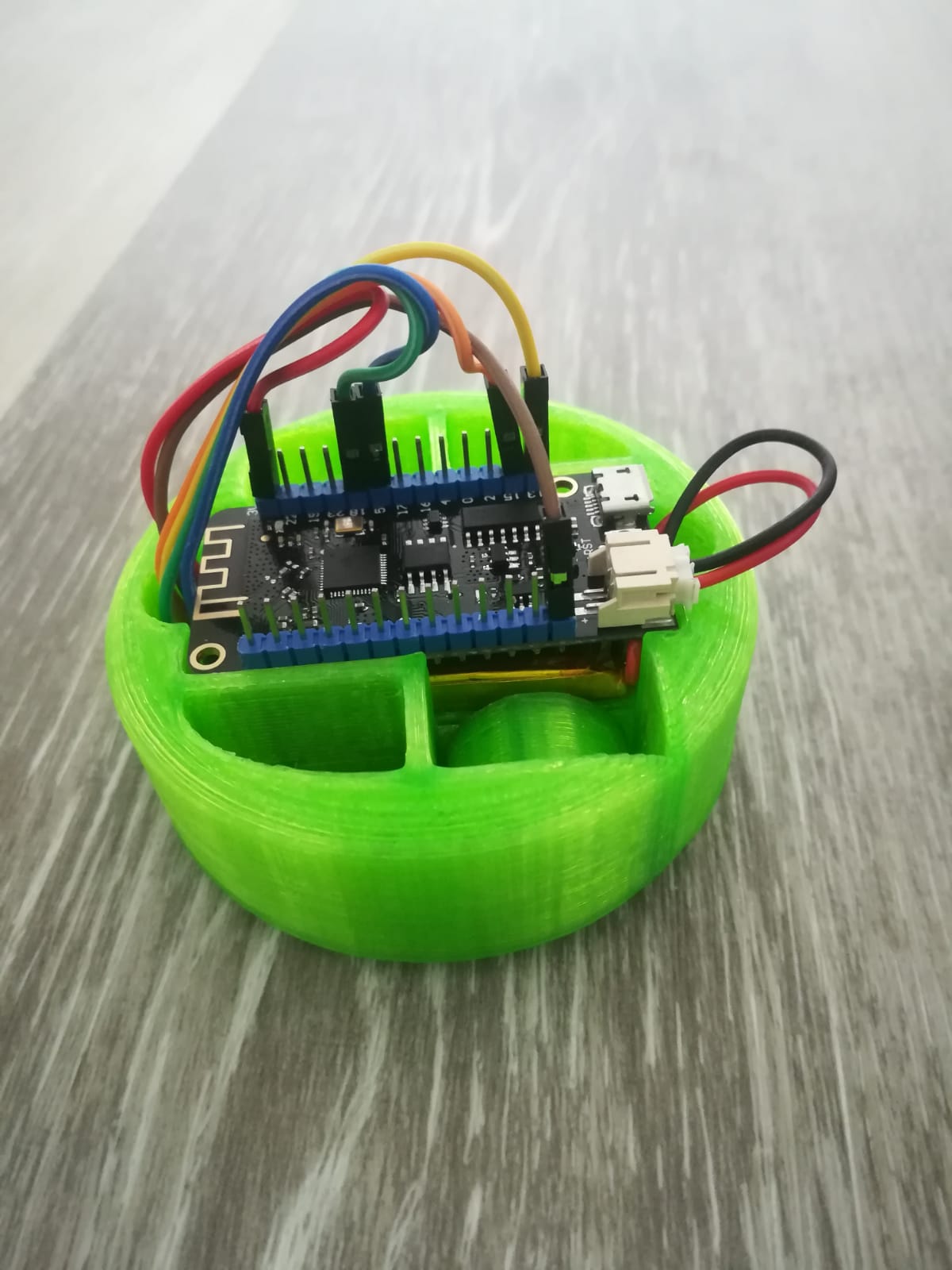
De robot bestaat uit 4 geprintte onderdelen: het frame, een tussenplaatje en 2 wielen. Passing komt niet heel nauw dus printen op 0.3 is geen probleem. Het totale gewicht is 74 gram, waarvan 40 geprint. De gehele robot is 7 cm doorsnee. Je hebt nodig 2x N20 gearmotor, 1x mini lipo-batterij, 1x l298n motor driver, 1x esp32 lolin lite, wat draad en headers. Alles klikt in elkaar en je hebt hooguit een boortje en een vijl nodig als het wat stroef loopt. Omdat de headers rechtop staan kan je oneindig door stapelen met andere printjes.
Veel bouwplezier.
Groetjes, Bas.
De ‘oude’ Wifi Robotwagen wordt nu DISK!
In ons lesprogramma hadden we natuurlijk al een software en electronica bouwplan voor een WiFi robotwagen. Lekker eenvoudig, en eigenlijk net niet goed genoeg om lekker te rijden – zo is dit vooral een uitdaging om zelf een frame te ontwerpen. Dit oude model zie je op: https://junioriot.nl/robotwagen-esp32/
Bas is aan de slag gegaan om een echt mini-autootje te bouwen. DISK. De motoren hebben een update gekregen en is er ook een echte buitenkant omheen gebouwd. De wifi bediening werkt net zoals eerst weer gewoon via je eigen telefoon. Met DISK hebben we de oudere versie niet meer nodig. Wat vinden jullie ervan?
3D onderdelen

Printen
Om de onderdelen te printen, download je eerst de STL file. Je kunt die meteen in PrusaSlicer laden. Dan print je het gewoon op 100% schaal. Je mag de STL ook importeren in je tekenprogramma. Daarna kan je er stukjes bij plakken, of juist er af halen. Zo maak jij jouw eigen variatie.
Bouwen
Bij het bouwen van dit model moet je goed opletten met solderen. De headers op de esp wijzen omhoog. De motor driver draden input komen op de onderkant van het printje en de draden naar de motoren op de bovenkant. Als je het anders doet, dan krijg je de draden niet in het frame. Kijk goed naar de foto’s.
De gesoldeerde onderdelen schuif je gemakkelijk in het frame. Je mag de motors later nog even vast zetten met dubbelzijdige tape, maar dat hoeft niet.



Software
In de Arduino IDE stel je in dat je de LOLIN32 gebruikt, en je probeert een Blink om te zien of alles werkt. Daarna haal je de software op voor de robot. Open deze in de Arduino IDE en kies een naam voor je robot. Stuur de software naar de LOLIN. Hoe dit precies werkt lees je in de instructiepagina.
Bedienen met je telefoon
Met je telefoon zoek je het wifi accesspoint op van je eigen robot. Daarna open je jouw browser en ga je naar de besturingspagina. Meestal staat die op 192.168.4.1
UPDATE: De software werkt nu nog makkelijker. Je verbindt met de WiFi van de robot, de aanmeldpagina verwijst je dan door naar de besturingspagina.
Extra
In het besturingsscherm zie je ook 4 knoppen. Daarmee kan je bijvoorbeeld een servo bedienen, of een Neopixel ledstrip. Hoe dat werkt, hoe je die aansluit, dat moet je zelf even in de software onderzoeken.