In dit verslag lezen we hoe Mia haar robotarm bouwt. De opdracht staat beschreven bij lab: https://junioriot.nl/arduino-joystick-robotarm-challenge/
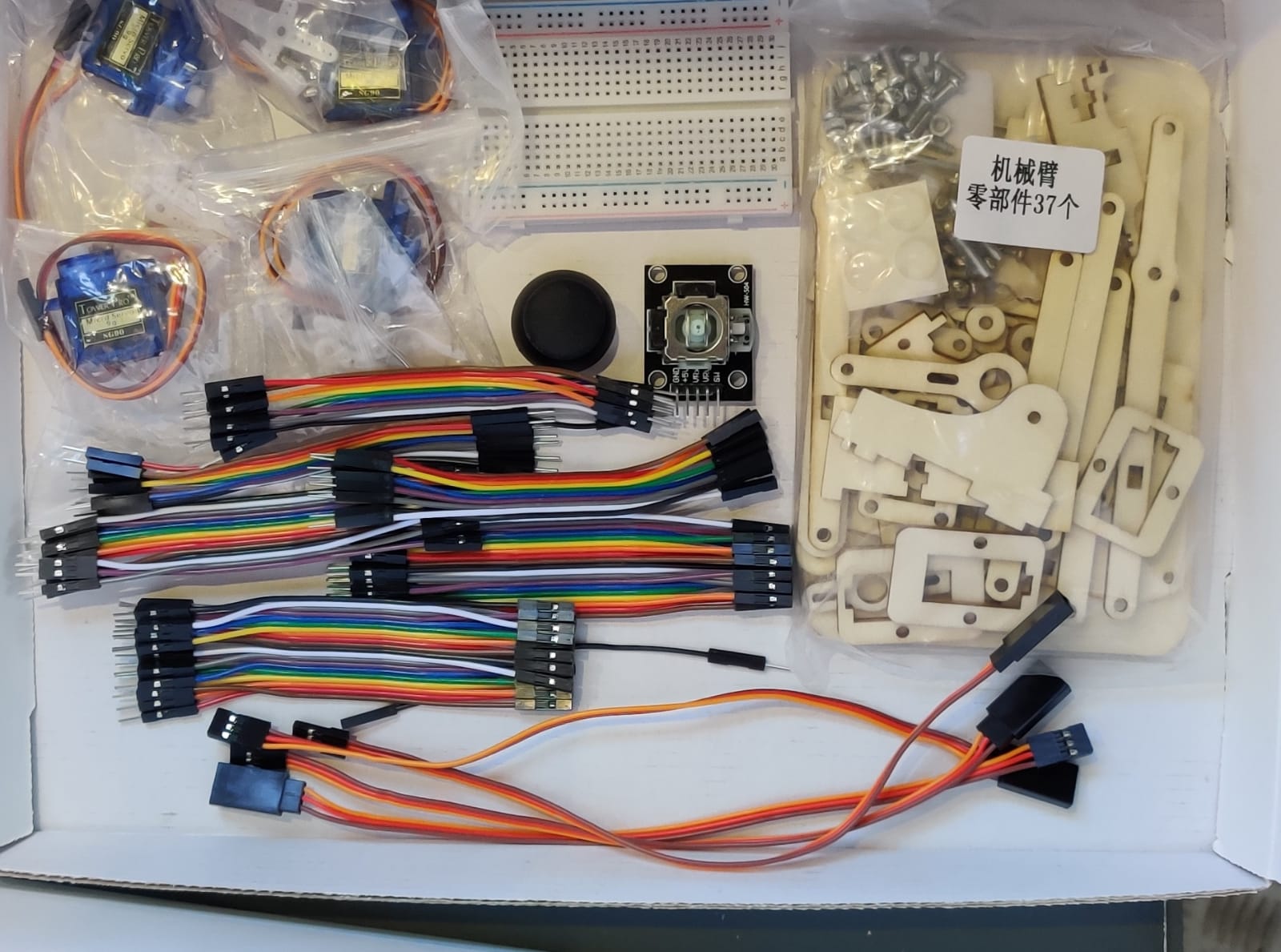
Wat heb je nodig
- Een silly robot arm bouwpakket.
- Een Afstandsmeter HC-SR04 (uitleg) https://junioriot.nl/
ultrasoon-sensor/ -
2 inputs 2 uitputs
- Usb snoer
- Arduino Nano
- Breadboard (uitleg) https://junioriot.nl/
breadboard/ -
Zilveren zakje met servo controller
-
Jumpstart kabels
- Nut x 11
- 6mm x 7
- 8mm x 15
- 10mm x 5
- 12mm x 8
- 20mm x 4
Stap 0 Kaliberen.
//Tekst komt nog
Sorteer je onderdelen dit is belangrijk want zou kun je makkelijk alles terugvinden. Let op soms lijken onderdelen op elkaar maar zijn ze niet hetzelfde.


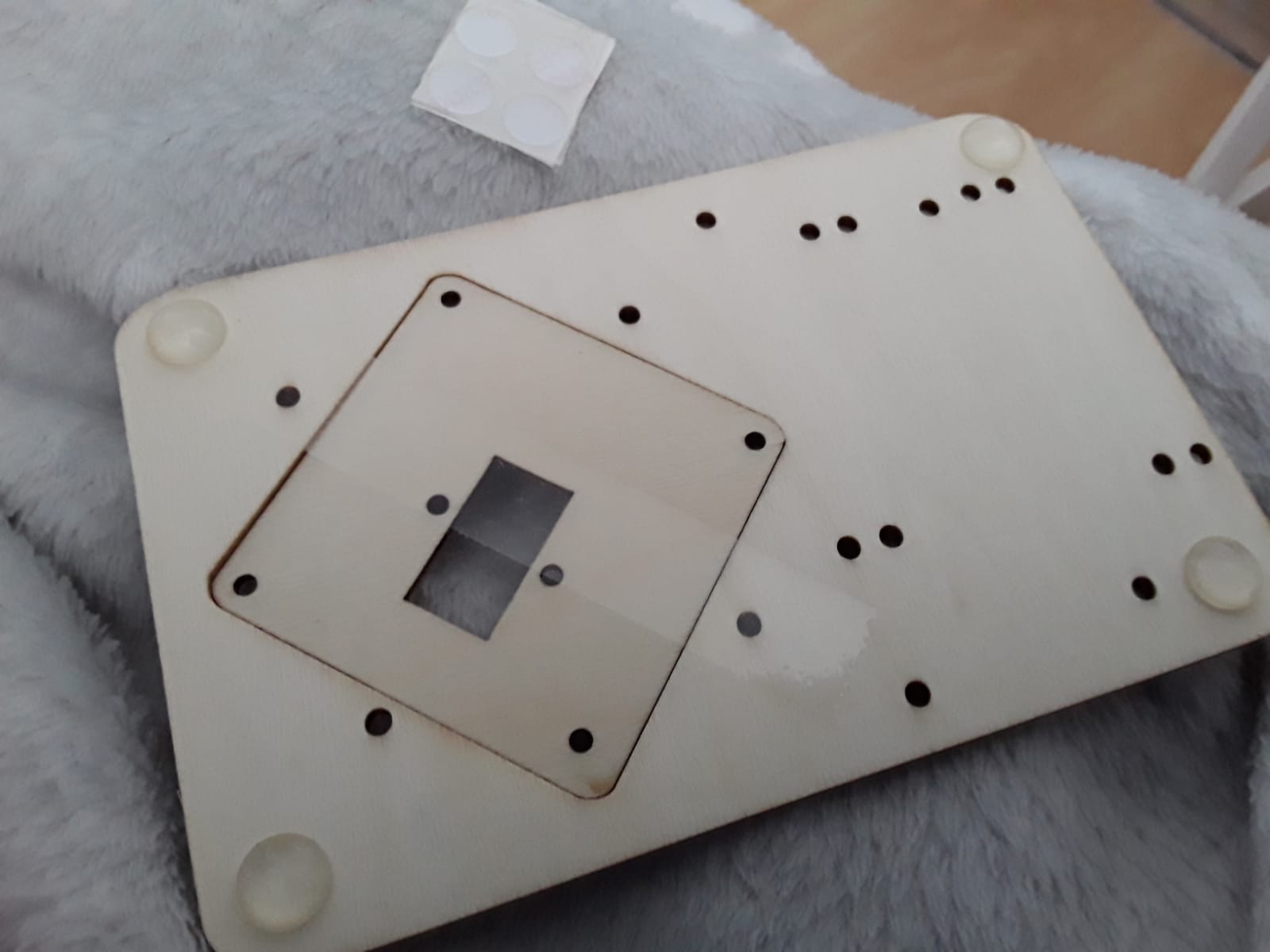
Stap 1 het eerste bord.
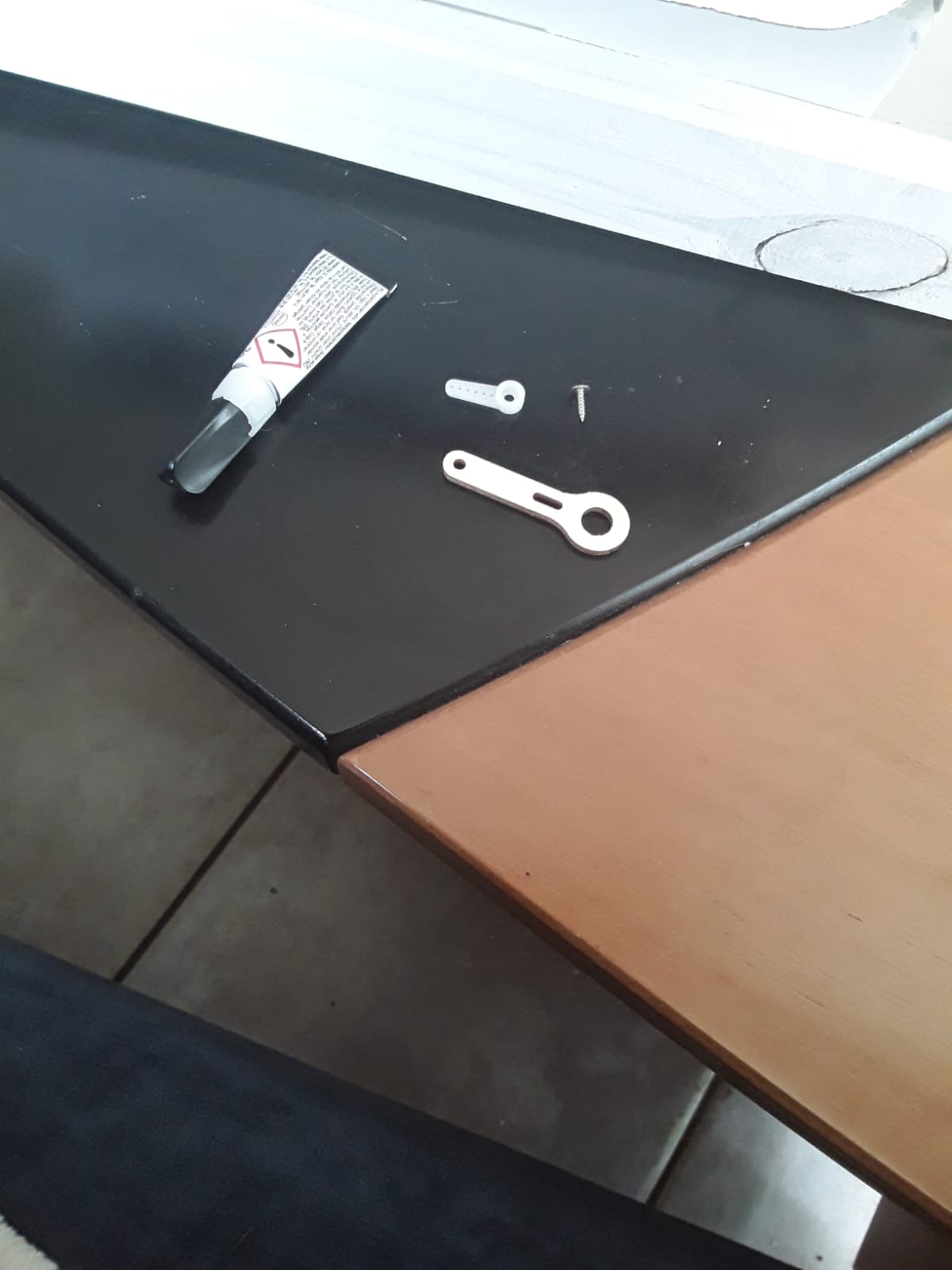
Pak het grootste onderdeel. En plak er de waterdruppeltjes onder op de hoeken van het bord. Dit zijn de pootjes van het geheel. Dus let op waar je ze plaatst.
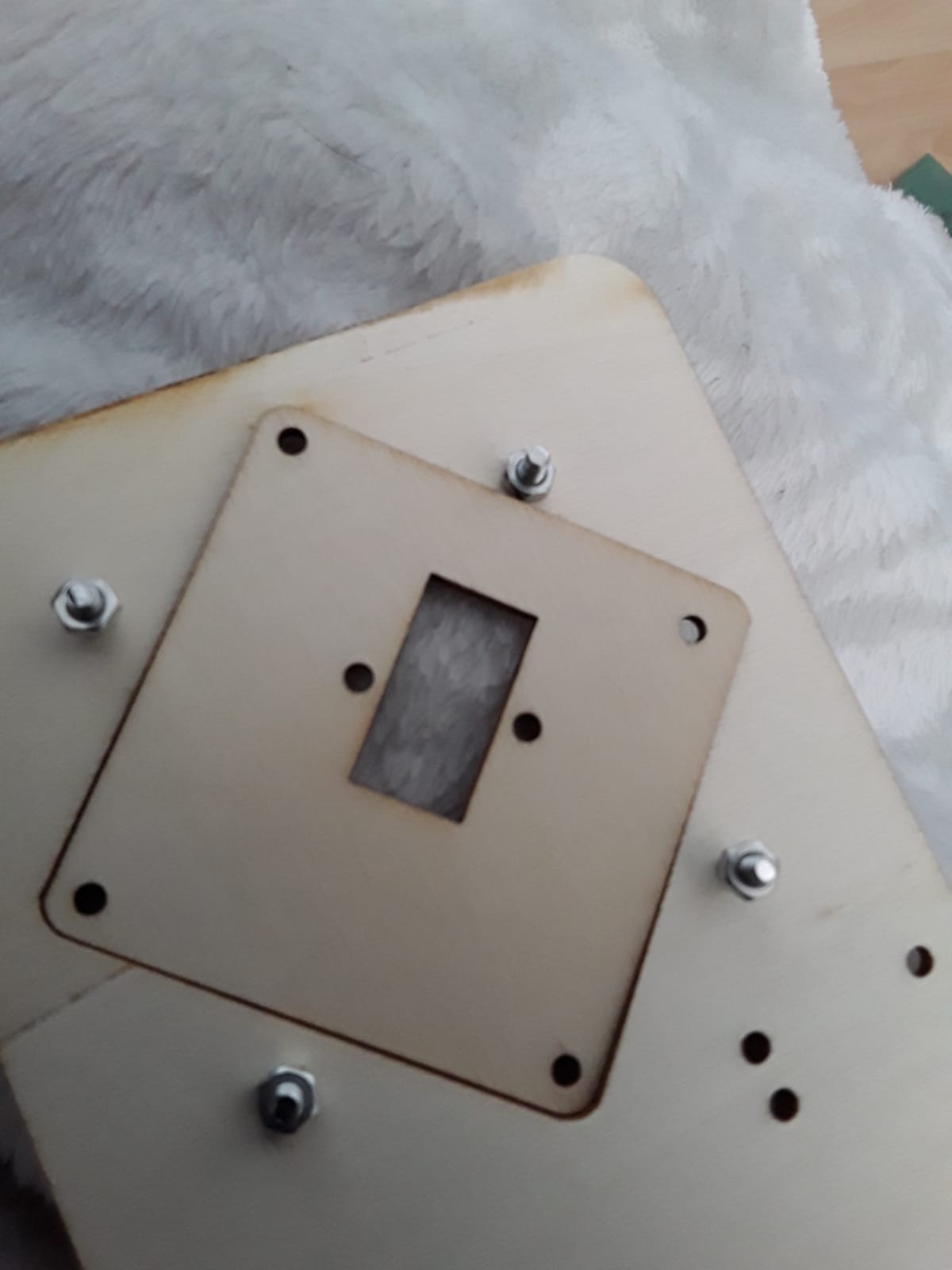
Zoek nu de langste schroefjes en zet ze vast met vier moertjes op het houten onderdeel. Zorg dat je niet te veel kracht zet: hout is teer en breekt snel. Controleer nog eens extra dat het de langste boutjes zijn en niet de kortere zoals op de foto anders past het later niet.

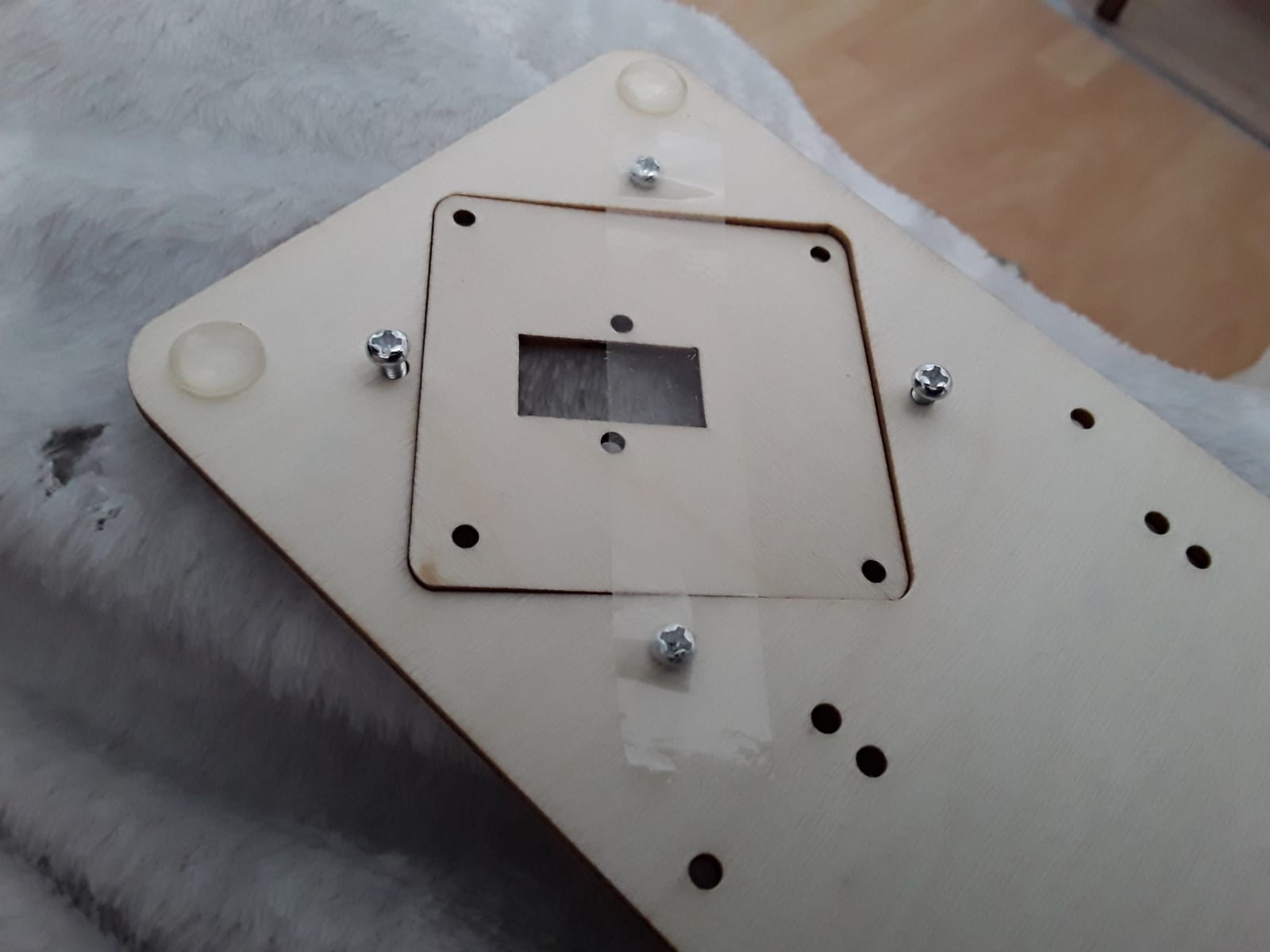
Stap 2.
Let op je hebt het allerkleinste plankje nodig er zijn er drie die erg op elkaar lijken dus als je slim bent vergelijk ze even. Anders past het niet. (Ik ging hier zelf de fout in)
Plaats het kleine plankje over de servomotor en bevestig het met 2 schroefjes aan het plankje.
Stap 3
Bevestig nu het nieuwe onderdeel dat je net hebt gemaakt aan het onderdeel van stap 1.
Stap 4
Plaats het kleine plankje over de servo motor zoals we al eerder hebben gedaan. Let op dat je de kabel in het gaatje plaatst en het draadje over de motor. Zet nu het geheel vast met schroefjes zoals we eerder ook al hebben gedaan.







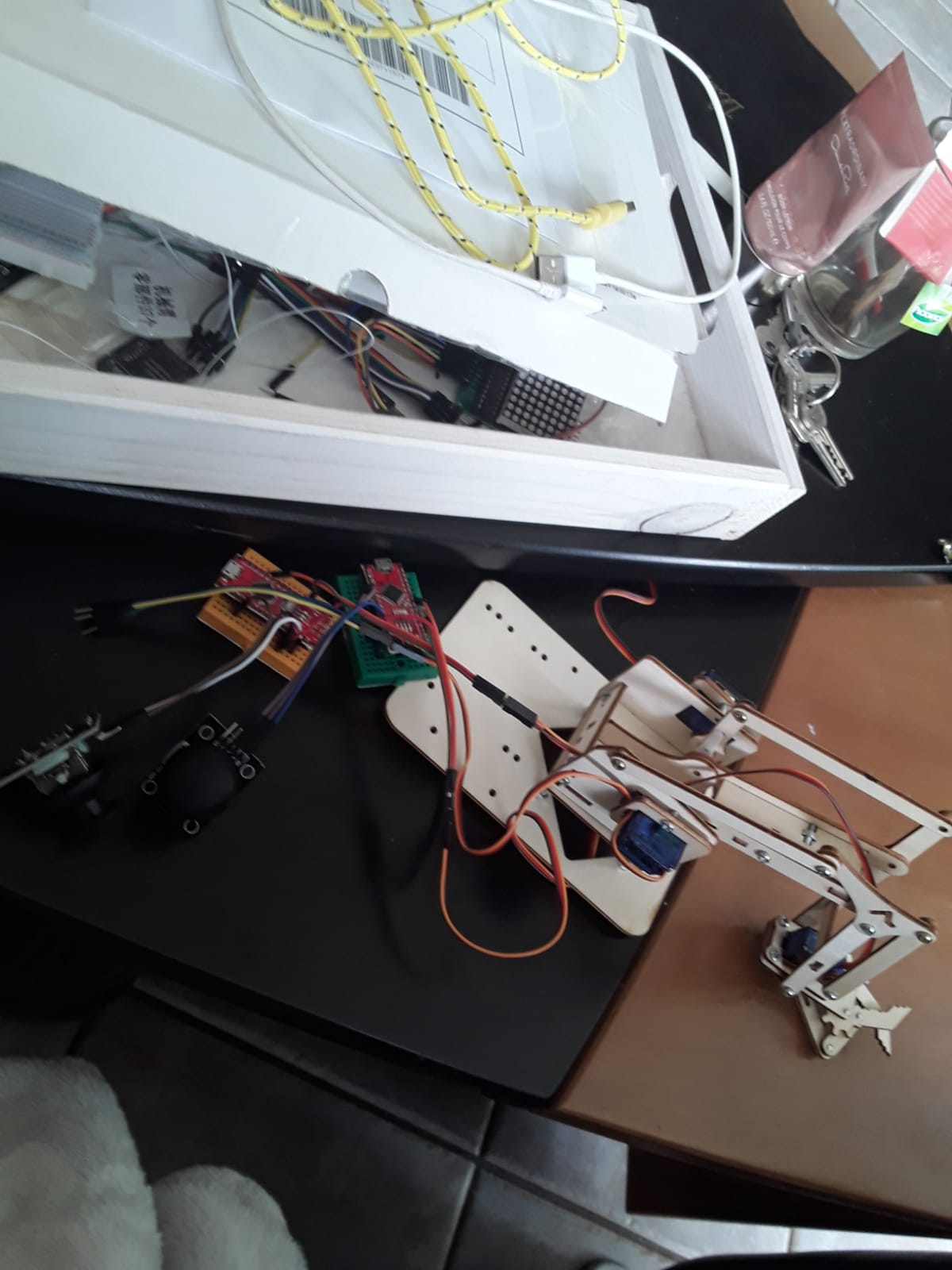
Let op: Mia heeft het project niet verder afgemaakt. Het was erg lastig om het frame van de robot te bouwen. Wel heeft Mia de servo’s in de middenstand gezet voor ze aan het frame werden gemonteerd.