— Leverbaar in overleg —
Onze shop prijs is 30 euro (per juli 2024).
Deze materialen maken deel uit van de Junior IOT jaarprogramma’s die we op de scholen geven als onderdeel van regulier onderwijs. Incidenteel schaffen ook andere scholen, bedrijven, particulieren deze materialen aan om in te zetten als deel van, of aanvulling op regulier onderwijs.
Je hebt onze Arduino Bag-of-Fun (link) nodig om de robot te bouwen en te besturen. Voor de andere aanvulsets kijk je op: https://junioriot.nl/arduino-nano-project-aanvulset/
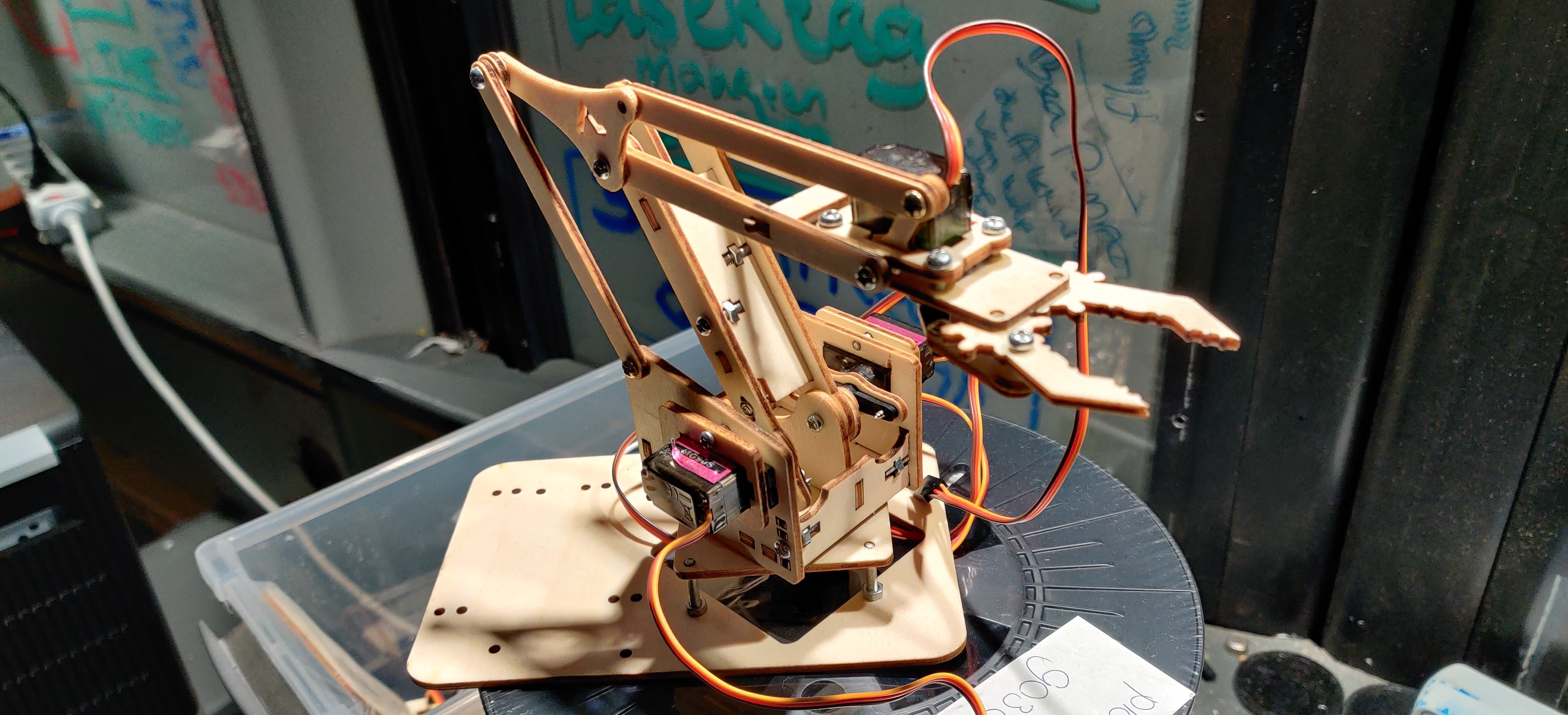
Aanvulset: Joystick robotarm challenge
(Update december 2020)
Deze aanvul set past bij onze nieuwe lessenserie van begin 2021: https://junioriot.nl/cursus-robotarm/. Al in 2020 hebben een aantal studenten gewerkt aan deze uitdaging, lees meer op: https://junioriot.nl/arduino-joystick-robotarm-challenge/
Let op: Voor deze set is een uitgebreide cursus uitgewerkt. Bij sommige scholen kan de leerling bijvoorbeeld 20 weken lang, één middag per week werken aan deze opdracht. Je begint met de Arduino Bag-of-fun. Stap voor stap doe je alle labs om alles te ontdekken over electronica, programmeren en de Arduino. Als afsluiting van deze lessenserie bouw je zelf de robot arm. https://junioriot.nl/cursus-robotarm/
Het is een uitdaging om het mechanische deel van de arm in elkaar te zetten. Het kwetsbare materiaal kan worden gerepareerd met houtlijm (bij de houten uitvoering) of secondenlijm (acrylaat/transparant).
Let op: de robotarm is geen professioneel bouwpakket. Alle onderdelen zijn aanwezig, maar schroeven moet je vaak met secondelijm vast zetten omdat het gewoon niet lekker past. Alleen aan te raden voor mensen met wat meer knutsel ervaring. Deze set is niet bedoeld voor hergebruik, en daar is de prijs op afgestemd.
Update december 2020: een aantal onderdelen van deze set zijn verhuisd naar grotere Arduino Bag-of-Fun startset. Daarmee is ook de prijs van deze aanvulset aangepast.
Inhoud:
- Me-arm inclusief bouten en moeren, acryl of hout (waarschijnlijk in de houten uitvoering).
- 4x Servo.
- Eventueel: 1x servo extender kabel (verlenging blijkt niet nodig).
- Eventueel: 1x extra Joystick.

Let op met de robot arm onderdelen:
De robotarm is van het populaire model “me-arm”. Voor dit lab kan je daarvoor al veel montage instructies vinden op het internet. Die instructies lopen door elkaar, je zoekt het zelf uit:
- Wat moet waar, en in welke volgorde? Op het internet kan je instructies vinden voor de verschillende versies. Kijk bewust naar de verschillen om te zien welk deel van welke instructie van toepassing is. Onze voordelige set zal meestal lijken op de oudere versie ‘me-arm’.
- De robot onderdelen zijn erg kwetsbaar. Werk zorgvuldig.
- Er is een uitvoering in acryl en een andere uitvoering in hout.
- Acryl heeft de neiging om te breken. Schroeven indraaien zorgt soms voor breuk. Schroeven blijven soms niet vast na te hard aandraaien. Gebruik eventueel wat secondelijm als het mis gaat.
- Hout is zachter, en soms blijven schroeven vast als je iets meer dan één keer monteert. Een te ruim schroefgaatje gaat weer werken als je het schroefje een stukje keukenpapier mee laat nemen het gaatje in. Gelukkig is hout goed met een beetje houtlijm lijm te repareren.
- De meegeleverde set schroeven hoort wellicht niet bij de uitleg die je hebt gevonden. Bij de houten versie lijken de schroeven soms te kort, los dit op door bij het schroefkopje eventueel een kuiltje te maken in het hout (met een schroevendraaier of een boortje).
- Servo’s hebben een eindstand, en die moet overeenkomen met de stand van de arm. Voordat je de servo’s in de definitieve positie monteert is het belangrijk om de servo’s goed naar de middenstand te sturen, en dan de onderdelen in de middenstand te monteren.
- De power van de servo’s neemt vermogen weg van de Arduino waardoor storing kan optreden. We lossen dit vaak op door de plus (rood) van de servo’s op een aparte voeling te zetten. Je hebt een micro usb-pinout-bordje om een extra USB voeding te gebruiken. Van de extra voeding verbind je de plus met rode draad van de servo, en alleen de min met de GND van de Arduino. Via een servo controller board kan je ook makkelijk een externe voeding aansluiten, maar dit moet je wel zelf regelen.
De Challenges:
- Bouw de arm. Dit is lastig en fouten zullen je in de weg blijven zitten. Ga gerust een paar stappen terug om te voorkomen dat iets blijvend verkeerd blijft. Maak desgewenst een beknopte en heldere bouw instructie.
- Bouw een besturing met de Arduino en twee joysticks. Joysticks springen natuurlijk terug naar de middenstand. Je mag ook proberen de druk-functie van de joystick te gebruiken om de grijper open- en dicht te doen.
- Bouw een besturing met de Arduino en vier potmeters. Hiermee kan je de robot nauwkeurig bedienen.
- Een servo reageert pas als de positie zo’n 5 graden afwijkt van wat je via de Arduino vraagt. Dit is om te voorkomen dat er continu stroom door de motors blijft lopen. Hoeveel wijkt de positie dan af bij een robot arm van 25 centimeter? Zoek eens op hoe jouw servo er van binnen uitziet, of er echt een positie meter in zit, en wat verder het doel is van alle onderdelen. Bedenk of je met een ander soort motors een meer nauwkeurige arm kunt maken.
Extra level, optioneel: Maak van een stuk karton een fabrieksvloer, of je gebruikt de 3D printer. Zet de robot op een handige plek vast. De robot maakt een herhalende beweging, bijvoorbeeld om een voorwerp van vaste plek A naar vaste plek B te verplaatsen. In de ruststand gaat er een led aan die aangeeft dat de bediener een programma mag kiezen. Met druk op één van de twee drukknoppen start je productie programma A of B.