In deze oefening breiden we de Arduino Stopmotor verder uit met wat we geleerd hebben van de PWM motorcontroller.
Dit is een verandering van de software van het stopmotor project; je hebt geen extra onderdelen nodig.
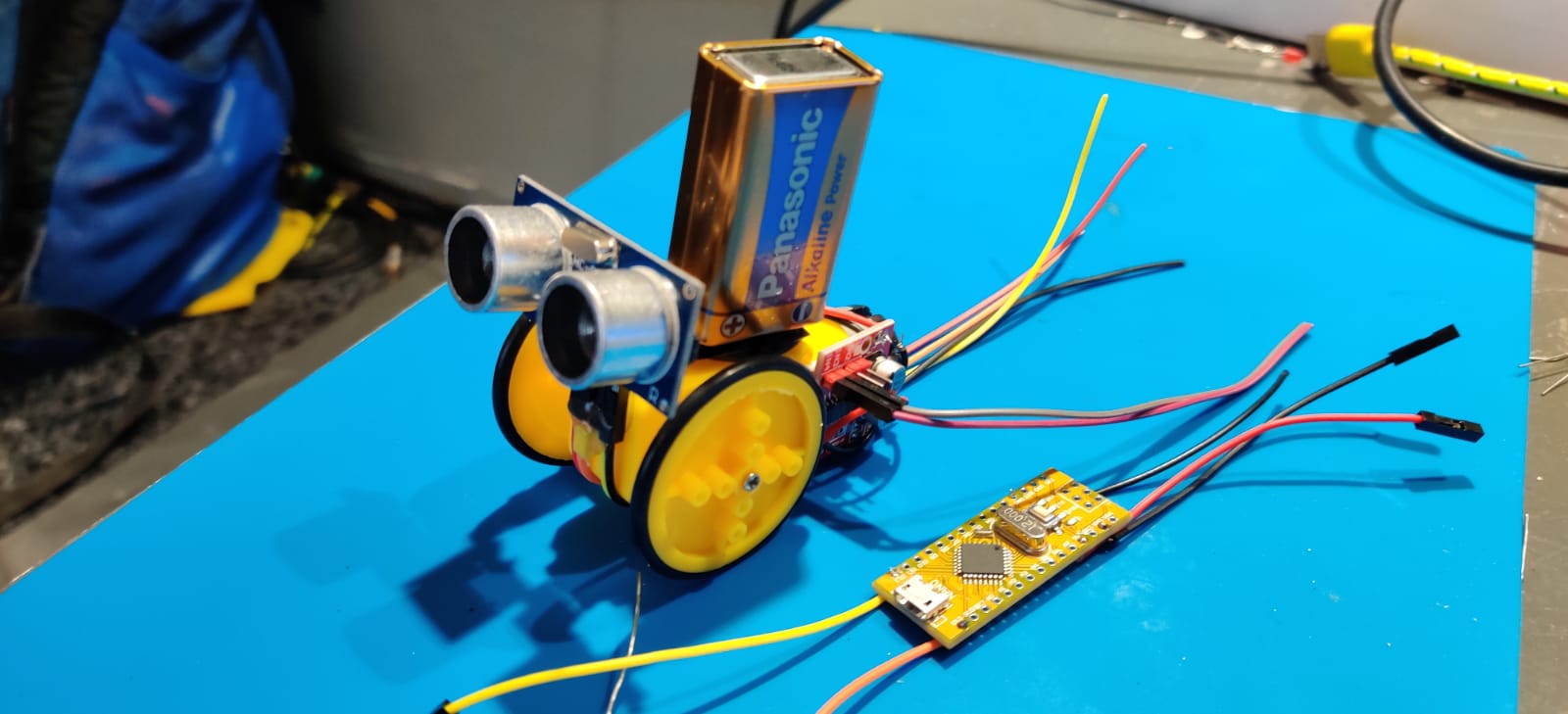
Uitdaging; Je auto stopt langzaam als deze dichter bij het doel komt. Als je met je hand voor de sensor beweegt wil hij je hand volgen zonder er tegen aan te botsen.
Uitdaging 2; Zorg dat de auto ook achteruit gaat als je hand dichterbij komt.
Challenge: Wat gebeurt er als er twee van deze auto’s tegen over elkaar komen te staan? Kan je die van jou zo programmeren dat de andere auto steeds een stukje naar achter wordt geknuffeld?